Підходи та обладнання для прискорення обробки даних агромоніторингу з БПЛА
Ринок послуг БПЛА щодо дистанційного зондування має величезні перспективи для управління врожаєм, проте досі він розвинений недостатньо через невідпрацьовані методичні підходи. Стандартна пропозиція щодо зондування формується як карти азотного живлення, волого забезпечення, ураження шкідливими організмами тощо, які надаються компанією впродовж трьох днів.
У практиці рослинництва ефективність технологічних прийомів залежить від термінів їх виконання, а тому саме оперативність і об’єктивність результатів моніторингу обумовлюють цінність моніторингу.
Великі обсяги даних можуть обраховуватись як в хмарних сервісах на віддалених серверах, так і безпосередньо в польових умовах за наявності потужних ноутбуків, вартість яких прийнятна для більшості господарств. Вочевидь, проблема в іншому, передусім вона пов'язана саме із методичними питаннями.
Здійснити зйомку і скласти карту не складно – геометричні параметри об'єктів фіксуються легко, проблеми починаються у вимірах спектральних показників, оскільки вони залежать від багатьох показників і передусім від стану освітлення і кута нахилу сенсора. Якщо у зйомці, зокрема для створення вегетаційних карт, методично ці питання не вирішені, обладнання використовується переважно в індикаційному режимі. Особливістю індикаційного режиму є виявлення характерних для поля ділянок, на яких будуть проведені наземні дослідження, за результатами яких і будуть створені відповідні карти. За такого підходу, з урахуванням габаритів полів, істотно прискоритись не вийде, а без цього масове промислове впровадження є сумнівним.
Методичні підходи до корекції за освітленням
Методично вирішення цього завдання можливе кількома шляхами, як запозиченими від супутникових технологій, так і притаманними саме БПЛА. Супутниковий моніторинг використовується з 70-х років, і питання отримання відтворюваних даних за зміни освітлення опрацьовувались на серйозному технічному та організаційному рівнях. Якщо був можливий доступ до наземних об'єктів, як в країнах Західної Європи та США, на прикладі метеостанцій створювали мережу станцій, що фіксували величину сонячного освітлення і на базі цього здійснювали корекцію за освітленням. Якщо доступ був ускладнений чи взагалі неможливий на територіях СРСР, використовували природосні оптичні шаблони: глибоководні водойми, об’єкти з відомими параметрами (дахи будівель), асфальтові дороги тощо. Незважаючи на певні успіхи, проблему не було остаточно вирішено і фахівцям доводилось враховувати можливість «мозаїки» на карті, отриманій зі знімків за різного освітлення, оскільки є певні проблеми із наявністю та працездатністю природних шаблонів.
Такий підхід можна використовувати і для БПЛА, для чого випускаються спеціальні дифузійні панелі відбиття. Дифузійні (матові) панелі, у порівнянні з глянцевими, мають стабільне та стійке відбиття незалежно від вирівнювання приладу, освітленості та геометрії перегляду. Тому, за наявності будь-де в полі зору камери об’єкту із відомими та стабільними параметрами можна перерахувати результати моніторингу, що легко реалізувати для відносно невеликих об'єктів. Для поля це буде складно і з фінансових, і з організаційних причин, оскільки панель повинна мати значні габарити для впевненої фіксації з БПЛА, і бути розміщеною безпосередньо біля дослідних об'єктів. Виконання таких панелей в стаціонарному режимі безпосередньо на полях недоцільно, оскільки вони потребують сервісного обслуговування, зокрема видалення бруду перед використанням.

Дифузійні відбивні панелі (https://www.pro-lite.co.uk/File/reflectance_targets.php) для дистанційного зондування
Отже, такий підхід прийнятний для прецизійних вимірювань, проте мало прийнятний для масового впровадження на вітчизняних промислових полях площею десятки чи сотні гектарів.
Альтернативою наземним шаблонам щодо калібрування за освітленням є використання штатного експонометру фотоапарату, який в автоматичному режимі здійснює оцінку рівня освітленості об’єкту. Тривалість зйомки (час експозиції), число діафрагми та інші параметри фіксуються і exiff даних файлу зображення. На базі цих даних можна розробити рівняння для врахування змін освітлення, проте вони будуть індивідуальні для конкретної марки фотоапарату. Такий підхід легко реалізувати на звичайних камерах з одним об’єктивом, а для професійних камер із кількома окремими вимірювальними каналами оптимальний термін експозиції буде різним і, відповідно, потрібні інші рішення.
Спектральні системи моніторингу для БПЛА із зенітним сенсором
Оскільки калібрування за освітленням є обов’язковим для промислових рішень, цілком логічним і слушним кроком у розвитку спектральних систем моніторингу аграрного призначення для БПЛА стало використання спеціального зенітного сенсору. Однією з перших серійних моделей, в яких було реалізовано цю інновацію, стала камера Parrot Sequoia, яку позиціонували як бюджетний варіант професійного спектрального обладнання. Цей легкий сенсор може бути встановленим на БПЛА класу міні, має 4 спектральні канали (NIR, Red Edge, R,G) для моніторингу та додатковий RGB канал для полегшення роботи оператора при виборі досліджуваного об’єкту. Здатність розрізнення становить 13 см/піксель на висоті 120 метрів.

Камера Parrot Sequoia має 4 спектральні канали (NIR, Red Edge, R,G) для моніторингу та додатковий RGB канал. А також варіант її встановлення на коптері.
Найближчим аналогом Parrot Sequoia вважається більш вартісна система MicaSense RedEdge-MХ, що має більші вагу (180 грам) і розширені можливості щодо здатності розрізнення спектрального складу – 8 см/піксель на висоті 120 метрів. Додатковий синій канал робить систему більш універсальною. Перевагою також є покращені комунікаційні можливості, що дозволили розширити можливості інтеграції до автопілоту БПЛА.
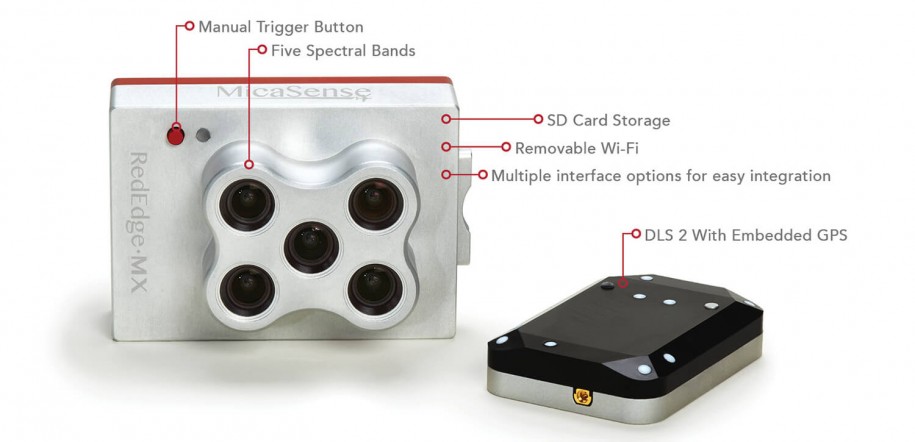
Система MicaSense RedEdge-MХ
Нині додатковий зенітний сенсор став стандартною комплектацією для професійних систем на базі БПЛА. Як приклад можна навести комплекс на базі квадрокоптеру Phantom 4 Multispectral. Компанія DJI на базі загальної платформи Phantom 4 розробила цілу лінійку різноманітних пристроїв, наприклад для геодезичних потреб із системою RTK, а також здатних забезпечити 10-сантиметрову і вищу точність мультиспектральну систему для аграріїв.

Зверху коптера розміщений стаціонарний зенітний сенсор.

А ось так зенітний сенсор виглядає з боку. Знизу змонтовано робочий сенсор.
Універсальність щодо платформи полегшує сервісне обслуговування та доступ до запасних частин, проте універсальність не сприяє індивідуальності. Загалом задача підібрати конфігурацію, оптимальну для кожного користувача, не має рішення. Стосовно комп’ютерного обладнання, для якого була така ж проблема стосовно потреб споживачів, було реалізовано відкриту архітектуру, коли на материнську плату можна додавати блоки сторонніх розробників і легко інтегрувати їх в програмне середовище.
Аналогічне рішення було здійснено і для спектрального обладнання для БПЛА – модулі від компанії Kernel. У розробці останньої фахівці прагнули розробити не власне камеру, а оптимальну систему саме для БПЛА. Фактично рішення є певним конструктором, коли користувач сам вибиратиме фотосенсор, фільтр, об’єктив тощо. Крім того, Kernel є першою камерою, яка підтримує UAVCAN, - "легкий протокол, призначений для надійної комунікації робототехнічних додатків через шину CAN". Шина CAN з'єднує показання сенсорів льотного контролера з ядром.
На сьогодні стандартний пакет даних містить позиціонування за GPS, час зйомки, швидкість повітря, компас, гіроскоп, акселерометр та горизонт рівня. Усі дані датчика, які користувач вибрав для збереження, будуть жорстко закодовані до метаданих кожного захопленого зображення (EXIF) для допомоги в обробці зображення.


Щоправда, це той випадок, коли індивідуальність коштує недешево, і вартість кожного каналу безпосередньо у виробника складає від 1000$.
У підсумку
Практично всі професійні системи коштують немало, проте вони дозволяють багато заробляти. Так, система, встановлена на літаковій платформі, реально здатна обстежувати площі в сотні гектар продовж одного вильоту. Професійні спектральні системи мають ще особливості, які ми більш детально розглянемо в наступних статтях.
Пасічник Наталя Анатоліївна (n.pasichnyk@nubip.edu.ua)